In popular culture, biologically-inspired robots play a sinister role. Movies like Blade Runner and The Terminator depict scenes of a humanoid faces split open to reveal violently grinning machines underneath. Such stories often portray machines in a dire “us vs. them†scenario. However, real life robots can have a much softer side. Taking inspiration from creatures such as jellyfish, rays, and octopuses, scientists are developing soft robots that can respond to different environments and can augment human capabilities.
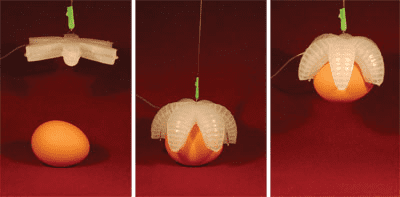
Image via Ilievski et al., 2011
Today soft robots are being developed to solve a wide variety of problems. Due to unpredictable worker availability, the cost of harvesting fruits and vegetables by hand on farms has risen. Agriculture companies are investigating soft robotics as a method to ensure produce is picked when ripe, not just when workers are available. Now imagine a traditional robotic claw trying to pick a tomato on a farm. Without very fine control, or an ability to react to different shapes, the claw would likely bruise or crush the tomato. But with a gripper made of soft plastic materials, the robotic arm can conform to the shape of the produce.
Just as harvesting requires a delicate touch, so does medicine. Degenerative diseases like ALS or Parkinsons can dramatically reduce a patient's quality of life by taking away control of their own body. With advances in responsive sensing and fine tuned motor control, soft robots can help patients regain fine motor skills. A soft robotic exoskeleton can stabilize and assist patients in everyday tasks, such as handling dishes or turning door knobs. Comparatively, a soft device can conform to a patient's physiology and needs where a mechanical exoskeleton would be heavy and cumbersome.
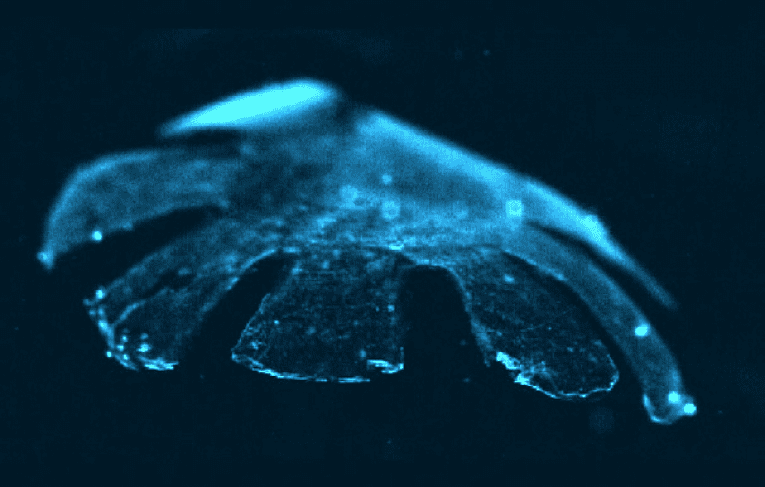
Image via Nawroth et al., 2012
Now scientists are hoping to take the technology one step further, from robots that interface with living organisms, to robots that mimic living organisms. At the Wyss Institute for Biologically Inspired Engineering at Harvard University, researchers have created a synthetic jellyfish, or “medusoidâ€. The man-made jellyfish consists of two layers: one of muscle cells and the other of malleable, elastic plastic. When you want to move your arm, your bicep muscle contract in response to signals from your brain. Because your muscles are attached to your bones, they pull on your skeletal frame, creating movement. That principle is now translated into muscle cells pulling on the medusoid's plastic frame. The purposeful alignment of cells along the medusoid's specific shape results in movement that mimics a real jellyfish swimming through the water. By applying an electric field to the water bath the medusoid lives in, the researchers can control the rate of contraction, which translates into how fast the medusoid swims. In a sense, the muscle cells have become biological actuators, translating electrical signals into movement. Unfortunately like all living things, the artificial jellyfish needs energy to function. The muscle cells require a high sugar environment, restricting the medusoid to laboratory use only. No open ocean for this jelly, yet.
Next the researchers wanted to create a bio-robot that could be directionally controlled, unlike the aimlessly swimming medusoid. Using a stingray as a model, the investigators created a synthetic ray using the same method as before. This time however, they engineered the muscle cells to contract in response to light. Using separate light sources, each side of the ray could be told to contract independently, enabling the ray to make turns. In the video below, the investigators were able to successfully guide the ray through an obstacle course.
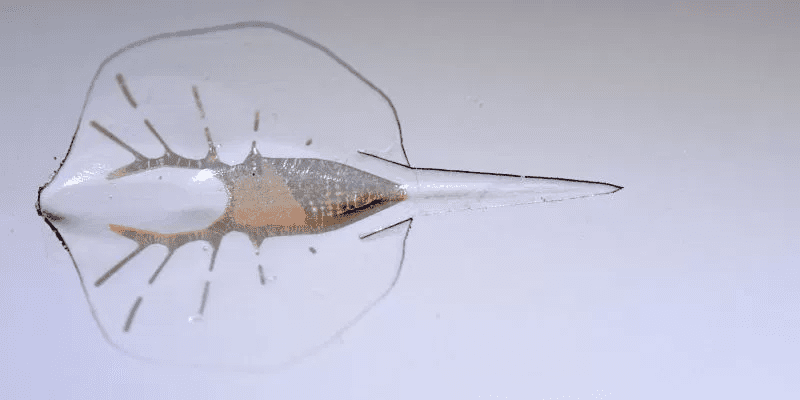
Image via Park et al., 2016
While we are still a long way off from manufacturing androids, our ability to create life-like robots is growing. By starting with simple jellyfish, and progressing to more complicated animals like rays and octopuses, we can build more and more complex systems. Furthermore, the above research proves that the form and function of an organism can be recreated without copying the exact physiology. Understanding how cells and materials function together can lead us to manufacturing whole prosthetic limbs, or even organs. Perhaps instead of trying to exactly recreate human tissues, we can design tissues that perform even better than their biological counterparts. Bio-robots may be artificially made, but they can help us understand how the natural world works and help create systems that work for us, not against us.
Permission for pictures and video granted by Dr. Kevin Kit Parker, and Dr. George Whitesides
| Citations:
Ilievski, F., Mazzeo, A. D., Shepherd, R. F., Chen, X. and Whitesides, G. M. (2011), Soft Robotics for Chemists. Angew. Chem. Int. Ed., 50: 1890–1895. doi:10.1002/anie.201006464 Nawroth, J. C., Lee, H., Feinberg, A. W., Ripplinger, C. M., McCain, M. L., Grosberg, A., … Parker, K. K. (2012). A tissue-engineered jellyfish with biomimetic propulsion. Nature Biotechnology, 30(8), 792–797. https://doi.org/10.1038/nbt.2269 Park, S.-J., Gazzola, M., Park, K. S., Park, S., Santo, V. D., Blevins, E. L., … Parker, K. K. (2016). Phototactic guidance of a tissue-engineered soft-robotic ray. Science, 353(6295), 158–162. https://doi.org/10.1126/science.aaf4292 Wehner, M., Truby, R. L., Fitzgerald, D. J., Mosadegh, B., Whitesides, G. M., Lewis, J. A., & Wood, R. J. (2016). An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature, 536(7617), 451–455. https://doi.org/10.1038/nature19100 |
About the Author
 Hailing from the deserts of Arizona, Mackenzie Carter is an enthusiastic masters student in the College of Veterinary Medicine. She is currently studying tissue engineering to model disease states in bone, namely panosteitis in canines. Mackenzie loves hands on projects, from ceramics to solar powered robots. In her free time she explores her passions: cephalopods, tea, and swing dancing. You can connect with Mackenzie via email at mackenziecarter@uga.edu. Hailing from the deserts of Arizona, Mackenzie Carter is an enthusiastic masters student in the College of Veterinary Medicine. She is currently studying tissue engineering to model disease states in bone, namely panosteitis in canines. Mackenzie loves hands on projects, from ceramics to solar powered robots. In her free time she explores her passions: cephalopods, tea, and swing dancing. You can connect with Mackenzie via email at mackenziecarter@uga.edu. |